






Projects
2020 - 2023
Efficient and Certified Algorithms for Robot motion Planning

Two IKS of JACO robot


Description:
The project titled "Efficient and Certified Algorithms for Robot motion Planning" (ECARP) is a joint project
between the Agence National de Recherché (ANR), France and Fonds zur Förderung der wissenschaftlichen
Forschung (FWF), Austria.
ECARP targets major computational challenges in three related fields: computer algebra, nonlinear
computational geometry and robotics. There are three parts of the projects:
Part 1. Roadmap algorithms and high-performance computing - Paris Team
Part 2. Serial manipulators: cuspidality analysis and trajectory planning - Nantes Team
Part 3. Parallel manipulators: analysis of aspects - Austria Team
Members:
Paris: Mohab Safey El Din, Jeremy Berthomieu, Jean Charles Faugère, Rémi Prébet
Nantes: Philippe Wenger, Damien Chablat, Durgesh Salunkhe
Austria (Innsbruck): Jose Capco, Christoforos Spartalis
Austria (Linz): Andreas Muller, Josef Schicho, Tobias Marauli
2020
Optimal kinematic design of a parallel manipulator for otological surgery
Mechanisms with motion constraint generator



Description:
This project was funded by Human FActors for Medical Technologies (FAME), Nantes. The project was a joint
collaboration between Ecole Centrale de Nantes, Centre Hospital Universitaire and Université Nantes.
This project aimed to provide solutions from robotics to provide assistance in endoscope handling during
the otolaryngologic surgeries. The tasks completed under this project were:
Task 1. Review of existing surgical robots
Task 2. Study of biological parts such as the skull and the nasal cavity
Task 3. Parallel manipulators: Novel mechanism with remote center of motion
Task 4. Design optimisation of the mechanism using state-of-the-art approaches
Members:
Ecole Centrale de Nantes: Damien Chablat, Durgesh Salunkhe
Centre Hospitalier Universitaire (CHU), Nantes: Philippe Bordure, Guillaume Michel
Université Nantes: Elise Olivier
External collaborators: Marcello Sanguineti (University of Genova), Shivesh Kumar (DFKI, Germany)
2017
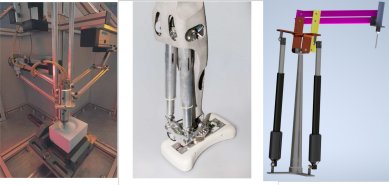
Sensorless Full Body Active Compliant 6-dof PM

6RSS parallel mechanism

Description:
This project was funded by Indian institute of Technology, Jodhpur, India.
This project culminated with the development of sensorless full body active force compliance in a 6RSS
parallel platform. The mechanism was designed indigenous and the control laws were developed from scratch
Task 1. Build a parallel mechanism
Task 2. Implement a control law for controlling motion
Task 3. Implement a sensing and control law for active force compliance
Task 4. Benchmark the results compared to the force measured on Bertec plate
Members:
Anirvan Dutta, Durgesh Salunkhe
IIT J: Suril V Shah
External collaborators: Arun Dayal Udai(IIT Dhanbad), Shivesh Kumar (DFKI, Germany)
2016
Force/Position Control of 3 DOF Delta Manipulator with Voice Coil Actuator

Delta mechanism
Description:
This project was funded by Robotics Lab of Birla Institute of Technology, Mesra.
This project used a Delta manipulator made from Voice coil actuators and introduced springs for position
control as well as passive force compliance. The resulting modified mechanism was able to perform tasks with
precision and was compliant.
Members:
Anirvan Dutta, Durgesh Salunkhe
BIT Mesra: Arun Dayal Udai (now: IIT Dhanbad)
External collaborators: Sudipto Mukherjee
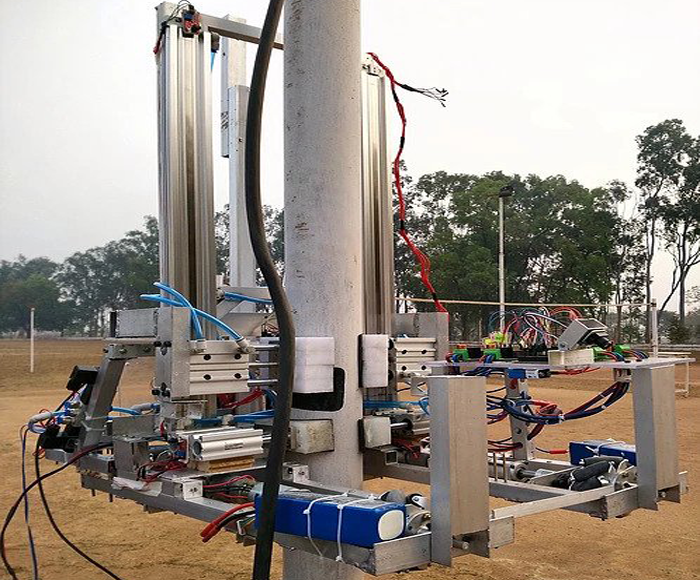
Design, trajectory generation and control of a research quadrotor platform using ROS

Quadrotor platform
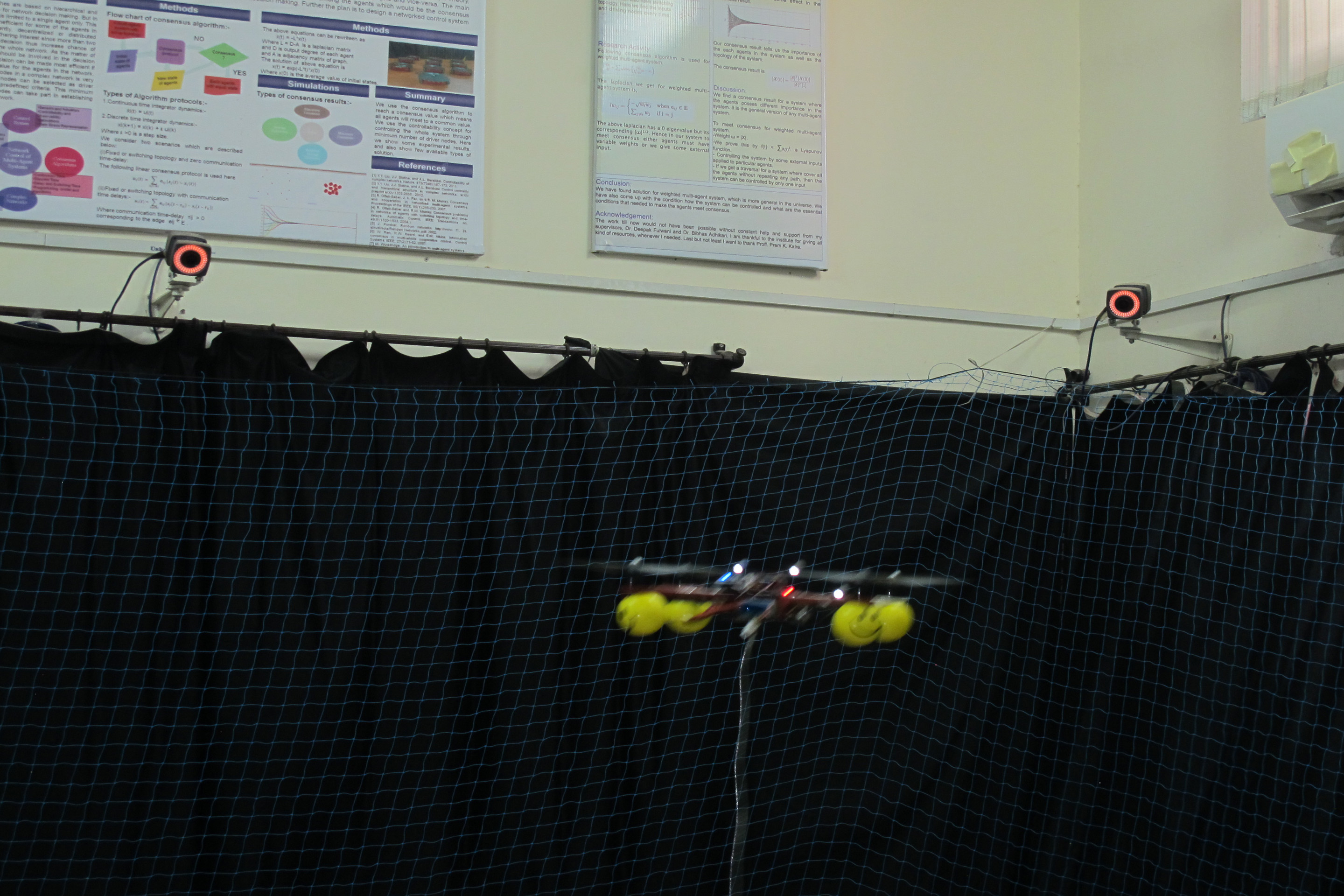

Description:
We describe the modeling, estimation and control of a quadrotor in 3D environment using the 3DR Pixhawk PX4
as controller through Robot Operating System. The paper discusses a method to measure moment of inertia of
quadrotor about its principal axes to achieve better results in an inexpensive way. The proposed test rig
also helps in tuning the control parameters of the quadrotor.
We also present the trajectory generation and segment optimization of the trajectory commanded to the
quadrotor. We describe a method of controlling the quadrotor through ROS by providing necessary inputs to
the flight controller using the built-in firmware.
Members:
Sujal Topno, Siddhant Sharma, Chandana Darapaneni, Amol Kankane
Durgesh Salunkhe, Suril V Shah
2014-2016
Robolution: robotics society, BIT Mesra

Award received from Mathworks in 2015


Description:
Team Robolution is a group of ingenious students from different branches with a common purpose-“DEXTERING
ROBOTICS”. The club’s aim is to instill robotics temperament among our fellow students and for this, the
club involves members as early as possible in various hands-on and multi-disciplinary collaborative
experience in designing, building, and programming robots. The club conducts various workshops on these
topics for the first and second year students . The club provides a platform where students get to
implement their theoretical engineering knowledge into practical use and for this the team conducts many
robotics events in the university’s technical fests.
A part of our club, ‘Team Pratyunmis’ , is the official ABU ROBOCON participating team of BIT Mesra which
is the largest robotics competition in Asia Pacific. Well defined goals, an organized and disciplined work
structure and motivated members is what has helped the club to grow to the present level.
Members during my tenure:
2K12: Inderjeet Yadav, Shubham Paul, Vinit Kumar, Sindhu Sharma, Gaurav Kumar, Sriman Narayan, Durgesh Salunkhe
2K13: Hritwik Shukla, Ajay Shah, Sujal Topno, Siddhant Sharma, Anirvan Dutta, Himanshu Ranjan, Chirag Parikh,
Aaquib Reza Khan, Naman Sharma, Ravi Ranjan