





ICRA 2023, London, UK
Paper
Trajectory planning issues in commercial cuspidal robots
D. H. Salunkhe, D. Chablat, P. Wenger,
In
Proceedings of the International Conference on Robotics and Automation,
(ICRA), 2023, London, United Kingdom
Error: The α4 and α5 in Table I are 55 degrees instead of 90 degrees
Abstract:
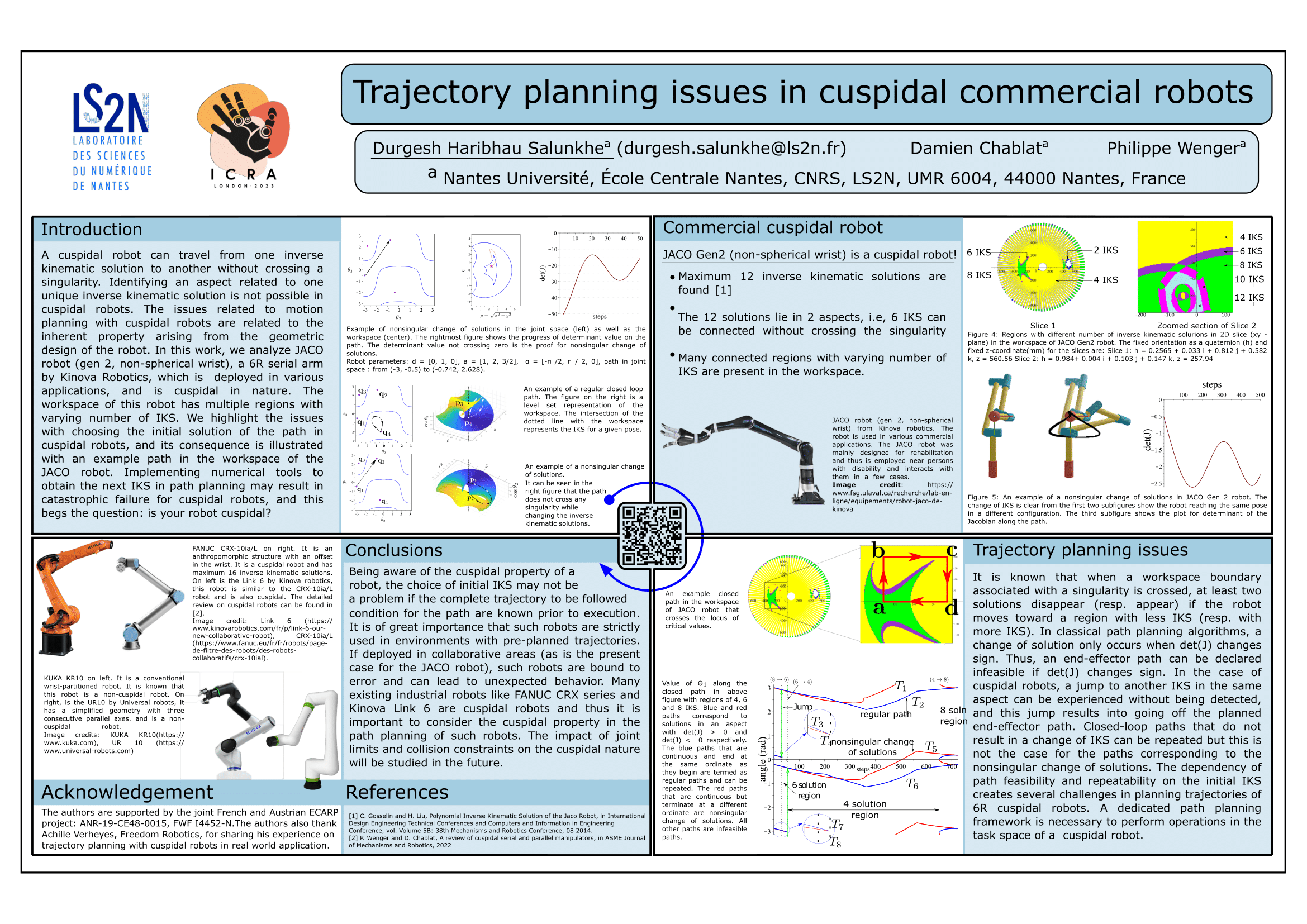
A cuspidal serial robot can travel from one inverse kinematic solution to another without crossing a
singularity. Cuspidal robots ask for extra care and caution in trajectory planning, as identifying an aspect
related to one unique inverse kinematic solution is not possible. The issues related to motion planning with
cuspidal robots are related to the inherent property arising from the geometric design of the robot. The
cuspidality property has not been considered in recent industrial 6R robots with a non-spherical wrist. In
this work, cuspidality is illustrated with the JACO robot (gen 2, non-spherical wrist), a serial arm by
Kinova Robotics which is deployed in various applications and is cuspidal in nature. A nonsingular change
of solutions for the robot is provided to highlight the effect of cuspidal robots on the interference with
the environment. The pose with multiple inverse kinematic solutions in an aspect is presented.
Problems in choosing the initial solution of the path in cuspidal robots, and its consequence, is
illustrated with an example path in the workspace of the JACO robot. The paper presents the importance of
cuspidality analysis of 6R robots and the implications of neglecting it.
Poster
[POSTER] Trajectory planning issues in commercial cuspidal robots
Presented by: D. H. Salunkhe
Details:
In this poster, we explain the issues related to motion planning with
cuspidal robots that are related to the inherent property arising from the geometric design of such robots. The cuspidality property has not been considered in recent industrial 6R robots with a non-spherical wrist. We illustrate the JACO robot (gen 2, non-spherical wrist), a serial arm by Kinova Robotics which is deployed in various applications, and is cuspidal by nature. A nonsingular change of solutions for the robot is provided to highlight the effect of cuspidal robots on the interference with the environment. Problems related to choosing the initial solution of the path in cuspidal robots, and its consequence, is illustrated with an example path in the workspace of the JACO robot. The poster tries to ring a warning bell for all the designers designing a 6R serial robot.
Graphical abstract

[GRAPHICAL ABSTRACT] Trajectory planning issues in commercial cuspidal robots
Details:
The graphical abstract summarizes the contributions of the paper in 4 points:
1. Introducing the terminology, 'cuspidal robot'.
2. Showing an example of industrial arm that is cuspidal (JACO robot, KINOVA robotics).
3. Explaining the issue of path feasibility and the dependence of path repeatability on the initial choice of the inverse kinematic solution.
4. A brief warning for caution in handling cuspidal robots in collaborative activities.
It also asks an important question to the designers: IS YOUR ROBOT CUSPIDAL?
Videos
Video description:
The video explains following things:
1. Introduces the terminology, 'cuspidal robot'.
2. Showing an example of industrial arm that is cuspidal (JACO robot, KINOVA robotics).
3. Explaining the issue of path feasibility and the dependence of path repeatability on the initial choice of the inverse kinematic solution.
4. Real life failure in trajectory planning in industrial robots